Manipulator for 3D printer created in Kazakhstan
The development belongs to scientists at Satbayev University
Specialists at Satbayev University have created a manipulator that will improve the accuracy of a construction 3D printer. It will be integrated into a concrete pump truck. This was reported by the press service of the Ministry of Science and Higher Education of Kazakhstan.
The solution of Kazakh scientists ensures accurate positioning of the printing head, preventing deviation during layer-by-layer laying of concrete. The university believes that this will simplify the introduction of 3D printing in construction on an industrial level.
Currently, gantry, serial, or cable robotic systems are used on 3D printers to position the printing head. However, they have a number of disadvantages, including the complexity of calibration and the impossibility of operation in conditions of vibration and sudden temperature changes.

Partners of Satbayev University from the Dresden University of Technology suggested using a concrete pump truck as an alternative. But during printing, its kinematic structure leads to deviations, which affects the accuracy of the result.
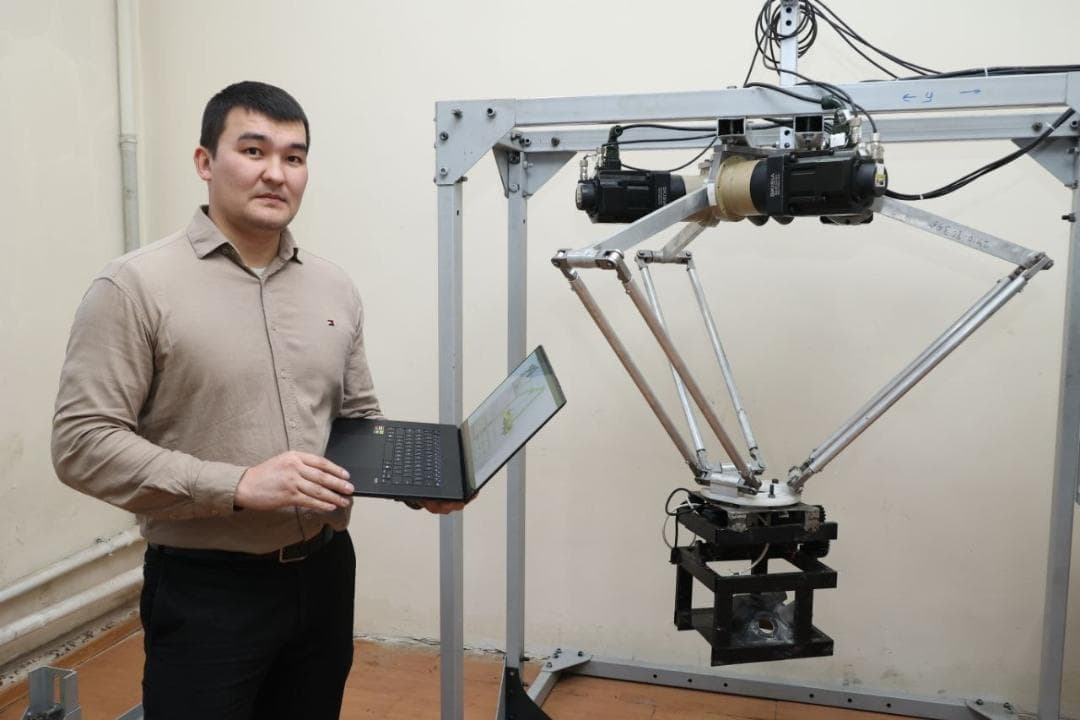
Kazakh scientists solved this problem by proposing a compensation manipulator and a printing nozzle for working with concrete. The parallel delta-type manipulator turned out to be the most effective.
Specialists developed a 3D model of the device and manufactured its prototype on a 1:1 scale. The manipulator has already been tested with a load of up to 46 kg. The project is being implemented as part of a grant for 2023-2025 from the Science Committee of the Ministry of Science and Higher Education of Kazakhstan.
Комментарии